
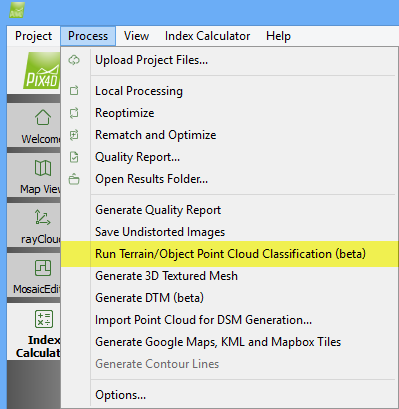
- 메뉴 프로세스 > 지형/객체 포인트 클라우드 분류 실행(베타)


액세스 :메뉴 바에서, Process > Run Terrain/Object Point Cloud Classification (Beta)(스텝 2. 포인트 클라우드 밀집화가 완료된 경우 사용 가능합니다.)를 클릭하십시오.
중요 :스텝 2. 포인트 클라우드 밀집화가 프로세싱 될 때 기본적으로 계산되지 않으나 스텝 2. 포인트 클라우드 밀집화가 처리되는 동안 분류를 계산하는 것은 가능합니다. 단계별 지침에 대한 자세한 설명 : 203186589
해당 기능은 분류되지 않은 포인트 사용하고 밀집된 포인트 클라우드의 삭제된 포인트를 사용하지 않고, 각 포인트가 지형/객체 클래스가 분류된 포인트 클라우드 밀집화를 계산합니다.
- - 지형 클래스 : 지형 포인트를 구성합니다
- - 객체 클래스 : 객체 포인트를 구성합니다
분류 파라미터를 설정하기 위해 프로세싱 옵션에서 사용할 수 있습니다. : 202557799
포인트 클라우드 분류를 계산하는 방법에 대한 단계별 지침 : 203186589
중요 :계산된 지형/객체 분류 편집 및 한 개의 클래스에서 다른 클래스로 이동하고, 삭제하고, 다른 새로운 클래스로 움직이는 등의 포인트 움직임이 가능합니다. 단계별 지침은 다음을 참조하십시오. : 202560499
참조 :지형 포인트 클래스가 존재할 경우, DTM(beta) 생성이 가능합니다. 단계별 지침은 다음을 참조하십시오. : 203204259
