
- 메뉴 프로세스 > 프로세스 옵션.. > 1. 초기 프로세싱 > 일반


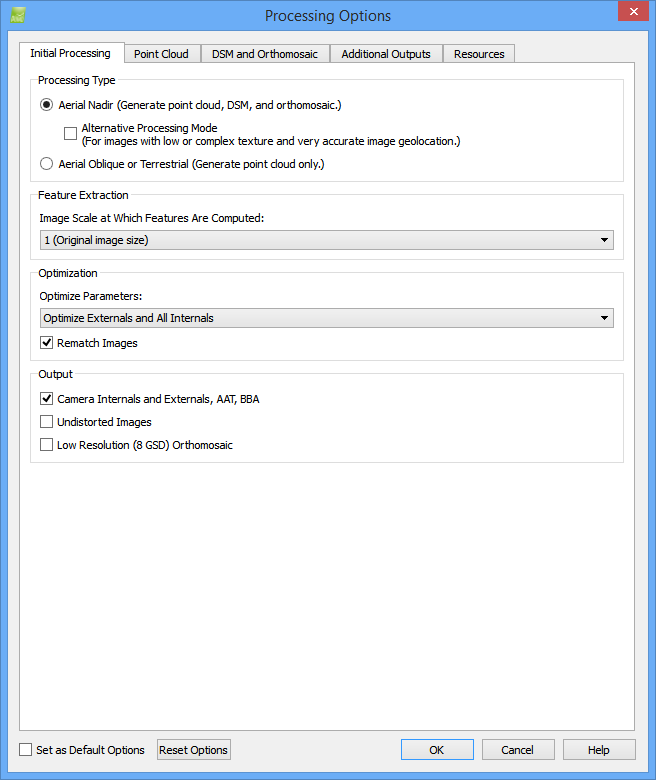
액세스 : 메뉴바에서 Process > Options를 클릭하십시오 5개의 탭을 가진 팝업이 나타납니다.
| 초기 프로세싱 | 포인트클라우드 | DSM 및 오르도모자이크 | 추가 출력 | 자료 |
- - 프로세싱 : 프로세싱 하기 위한 프로젝트의 유형을 정의합니다.
- - 기능 추출 : 기능이 계산된 이미지 크기를 설정합니다.
- - 최적화 : 최적화 과정에 관한 몇 가지 파라미터를 설정합니다.
- - 출력 : 원하는 출력을 선택합니다.
또한 5개의 액션이 있습니다. :
- - OK : 변경점을 확인
- - Cancel : 변경점을 저장하지 않음
- - Help : Pix4Dmapper 도움말을 엽니다
- - 기본 옵션으로 설정(Set as Default Options) : 프로세싱 옵션 탭의 모든 현재 설정을(초기 프로세싱, 포인트 클라우드 밀집화, DSM 및 오르도 모자이크 생성, 추가 출력, 자료), 섹션 프로세싱을 제외한 초기 프로세싱 탭(공중 나딜, 대체 프로세싱 모드, 공중 경사 혹은 지상파)을 미래의 프로젝트에 대한 기본 옵션으로 저장.
기본 옵션으로 설정 : 체크 박스 선택 - - 옵션 초기화(Reset Options) : 모든 프로세싱 옵션 탭의 Pix4Dmapper 기본 값을 초기화 합니다.( 초기 프로세싱, 포인트 클라우드 밀집화, DSM 및 오르도 모자이크 생성, 추가 출력, 자료)
 프로세싱
프로세싱해당 섹션에서는 프로젝트의 유형을 정의하기 위해 프로세싱 됩니다. 선택된 프로젝트 유형은 초기화 프로세싱뿐 아니라 생성된 결과에 영향을 미칩니다. 다음 프로젝트 유형을 사용할 수 있습니다. :
- - 공중 나딜(기본값) : 공중 및 카메라 방향이 나딜 방향을 가리키는 이미지에 권장합니다. 이미지는 UAV, 유인 항공기, 풍선 등으로 촬영할 수 있습니다. 나딜의 방향은 카메라 축(렌즈의 방향)이 지면과 수직인 것을 의미합니다. 포인트 클라우드뿐 아니라 DSM 및 오르도 모자이크도 스텝 2. 포인트 클라우드 밀집화와 스텝 3. DSM 및 오르도 모자이크 생성 단계에서 생성될 것입니다.
- - 대체 처리 모드 : 지면이 평평한 곳에서 프로젝트의 공중 나딜 이미지를 처리하는 것을 추천합니다. 이것은 반복되는 구조(잘린 필드)의 농업 및 임업 응용에 사용하는 것을 권장합니다. 해당 옵션은 좋은 이미지의 위치 정보를 필요로 합니다.
-
예시 : 대체 처리 모드 유형은 객체가 본질적으로 평평할 때 사용할 수 있습니다. 예를 들어 이것은 이미지가 높은 고도에서 촬영되어 작은 차이의 나무 높이끼리 대체 처리 모드에 영향을 주지 않을 때 숲/나무에 사용될 수 있습니다. 이러한 유형의 프로젝트를 사용하는 경우 권장하지 않습니다.
- - 잔디밭
- - 모래
- - 눈
- - 공중 오블리크 또는 지상파 : 공중에서 촬영된 오블리크 이미지 뿐만 아니라 지상에서 촬영한 이미지(오블리크 혹은 나딜)의 경우 권장합니다. 오블리크 이미지는 수직이 아닌 카메라를 축으로 촬영된 이미지 입니다. 포인트 클라우드는 스텝 2. 포인트 클라우드 밀집화에서만 생성 될 것입니다.
-
중요 : 공증 오블리크나 지상파 유형이 선택되면, DSM 및 오르도 모자이크도 생성됩니다. 스텝 3. DSM 및 오르도 모자이크 생성 단계에서 선택 및 프로세싱되지 않습니다. DSM 및 오르도 모자이크를 생성하기 위해 공중 나딜 모드를 사용하여 프로세싱 하는 것을 권장합니다.
특징 추출 섹션은 특징을 계산하는 이미지 크기를 설정할 수 있습니다. 다음을 선택할 수 있습니다. :
- - 1(원본 이미지 사이즈, 기본) : 권장하는 이미지 크기 값
- - 2(더블 이미지 사이즈) : 작은 이미지(예 : 640x320 pixel)에서 2 스케일(더블 사이즈 이미지)을 사용해야 합니다. 더 많은 특징이 추출될 것이며 결과의 정확성에 긍정적인 영향을 미칠 것입니다.
- - 1/2(절반 이미지 사이즈) : 높은 오버랩을 가진 큰 프로젝트의 경우, 절반 사이즈 이미지는 프로세싱의 속도를 높이는데 사용할 수 있습니다.(일반적으로 다소 감소된 정확도의 결과가 추출될 것입니다.) 해당 스케일은 흐리거나 낮은 텍스쳐의 이미지에 사용하는 것을 권장합니다. 이것은 일반적으로 이미지에 대한 기본 스케일보다 나은 출력의 결과가 나올 것입니다.
- - 1/4(1/4 이미지 크기) : 높은 오버랩을 가진 초 대형 프로젝트의 경우, 1/4 사이즈 이미지는 프로세싱의 속도를 높이는데 사용할 수 있습니다.(일반적으로 다소 감소된 정확도의 결과가 추출될 것입니다.) 해당 스케일은 매우 흐리거나 매우 낮은 텍스쳐의 이미지에 사용하는 것을 권장합니다. 이것은 일반적으로 이미지에 대한 기본 스케일보다 나은 출력의 결과가 나올 것입니다.
최적화 단계는 자동 공중 삼각형(AAT), 번들 블록 조정(BBA), 카메라 자가 교정 단계를 여러 번 단계에 최적화 재구성이 발견될 때까지 실행되는 것을 포함합니다. 최적화 단계에서 두 개의 파라미터를 설정할 수 있습니다.
| 최적화 파라미터 |
최적화 파라미터 프로세싱 옵션은 카메라 파라미터가 최적화 되도록 정의합니다. 두 개의 카메라 파라미터 유형이 있습니다.
최적화 단계는 최적화된 값을 계산하기 위해 초기 값에서 시작합니다. 다음의 초기 값이 사용됩니다.
스텝 1. 초기 프로세싱이 완료된 후, 내부 및 외부 파라미터의 최적화 값은 파일에 저장됩니다. 스텝 1. 초기 프로세싱 단계 이후 생성된 출력 파일에 대한 자세한 정보는 다음을 참조하십시오. : 202558519
참조 : 내부 카메라 파라미터의 초기 및 최적화 값은 또한 품질 보고서에도 표시됩니다.
최적화 파라미터 드롭다운 리스트에서 최적화된 카메라 파라미터를 선택할 수 있습니다. :
해당 옵션은 느린 롤링 셔터 속도와 느린 롤링 셔터 속도 같은 카메라를 처리하는데 유용합니다. |
| 이미지 재매치 |
|
해당 옵션은 일반적으로 재건의 품질을 향상시키는 초기 프로세싱의 첫 번째 부분 이후 더 많은 매치를 추가합니다. 식물 및 임업 프로젝트에서 해당 옵션의 사용을 권장합니다.
참조 :500개 이상의 이미지의 대형 프로젝트의 경우, 해당 옵션을 선택 해제하고 사용할 수 없습니다. 이미지를 재매치 하기 위해, 재매치 및 최적화 도구를 사용하여야 합니다. : 202558309
|
해당 섹션에서는 사용자가 원하는 출력을 선택할 수 있습니다. 다음을 생성할 수 있습니다. :
- - 카메라 내부 및 외부, AAT, BBA : 해당 옵션이 선택되었을 때 AAT, BBA, 최적화된 내부 및 외부 카메라 파라미터의 결과는 파일에 저장됩니다.
- - 왜곡되지 않은 이미지 : 해당 기능은 선택된 카메라 모델의 최적화된 왜곡 파라미터를 사용하는 각 원본 이미지의 왜곡되지 않은 복사본을 생성합니다.
-
중요 : 해당 기능은 원근 렌즈 카메라 모델을 사용하는 이미지 프로세싱 중에만 사용 가능합니다.
- 스텝 1. 초기 프로세싱이 이미 완료 되었을 경우, 스텝 1을 재실행 할 필요 없이 왜곡된 이미지를 생성할 수 있습니다. 자세한 정보는 다음을 참조하십시오. : 202557929
-
정보 : 카메라 왜곡에 관한 자세한 정보는 다음을 참조하십시오. : 202559069
- - 저해상도(8 GSD) 오르도 모자이크 : 해당 기능은 낮은 공간 해상도의 DSM 및 오르도 모자이크를 생성합니다.(GeoTIFF 형식으로) 병합된 파일뿐 아니라 타일은 출력 모두에 생성됩니다. DSM 및 오르도 모자이크는 원본 이미지의 GSD의 8배와 같은 GSD를 가집니다.
-
예시 : 원본 이미지가 5cm의 평균 GSD를 가질 경우, 저해상도 DSM및 오르도 모자이크는 40cm의 GSD를 가집니다.
- 저해상도 DSM은 자동 타이 포인트를 이용하여 생성됩니다. 저해상도 오르도 모자이크는 스텝 3. DSM 및 오르도 모자이크 생성 (Process > Options... > DSM and Orthomosaic Generation > Orthomosaic) 단계의 오르도 모자이크 알고리즘과 유사한 알고리즘을 사용하여 생성됩니다. 사용 가능한 옵션/알고리즘에 관한 자세한 정보는 다음을 참조하십시오. : 202559429
-
참조 : 다른 그룹에 속해있는 이미지를 프로세싱할 때 전체 프로젝트에 대해 하나의 DSM을 생성, 모든 이미지가 함께 프로세싱 되지만 그 그룹에 연관된 이미지를 사용하는 각 개의 그룹당 오르도 모자이크가 생성됩니다. 이미지 그룹에 대한 자세한 정보는 다음을 참조하십시오. : 202557949
